



الأخبار المتعلقة






كتب. أحمد خالد|
صنفت جمعية مهندسي السيارات SAE تقنيات القيادة الذاتية إلى خمسة مراحل وتنحصر التقنيات التي تم تنفيذها بالفعل في أول مرحلتين وكنا قد تحدثنا عنهما في الجزء الأول من هذه السلسلة، ويمكن الاطلاع عليه من خلال الرابط التالي «القيادة الذاتية...كيف بدأت وإلى أين وصلت؟»
مراحل لا زالت على قيد التطوير:
تتمكن أنظمة القيادة الذاتية بالمرحلة الثالثة من التحكم في معظم مهام القيادة بما في ذلك الفرامل والتوجيه والتسارع بجانب مراقبة البيئة المحيطة بالسيارة والسيطرة على جميع عوامل الأمان للسيارة.
يطلق على هذه المرحلة - القيادة الذاتية الشرطية- بسبب الظروف الخاصة اللازمة لعمل النظام مثل عدم وجود تقاطعات معقدة أو مشاه بالشوارع وسير السيارات باتجاه واحد، كما أنها في بعض السيارات قد لا تحتاج إلى تدخل بشري حتى سرعة ٦٠ كم/س وبالرغم من قدرة السيارة بتلك المرحلة على الاستغناء الجزئي عن السائق، لا بد من استعداد السائق للتدخل الفوري في حالة التنبيه بعجز النظام عن التعامل مع الموقف.
تحقق الأنظمة بالمرحلة الرابعة الصورة المستقبلية للسيارات التي تقود نفسها حيث يتحول السائق إلى راكب ولا يحتاج إلى التدخل في أي من وظائف السيارة، فهي مجهزة للتعامل مع مختلف المواقف المحتملة لكن في نطاقات وأماكن محددة.
أما المرحلة الخامسة فتعتمد على القيادة الذاتية المطلقة بدون أي حدود تقنية أو جغرافية حيث يمكن الاستغناء عن عجلة القيادة أو أية أداة للتحكم البشري ليقتصر دور الراكب على إدخال وجهته لنظام الملاحة وترك الذكاء الاصطناعي ليتولى مهام القيادة بالاعتماد على كم المعلومات الهائل الذي تقوم السيارات ذاتية القيادة بجمعها و التي قد يصل حجمها إلى أربعة ألاف جيجابايت بالدقيقة الواحدة.
تعمل شركة تدعى Waymo حاليا على تطوير أنظمة للقيادة الذاتية بالمرحلة الخامسة للاستخدام في سيارات تاكسي بدون سائق، تمتلك Waymo أسطولا يعمل بالولايات المتحدة الأمريكية كسيارات تاكسي بدون سائق باستخدام تقنيات الرادار وLidar، كما تعمل حاليا على تطوير أنظمة قيادة ذاتية لشاحنات النقل الثقيل.
عقبات تعرقل التطوير:
برغم الصورة المبشرة للتكنولوجيا التي قد تغير صورة السيارات المألوفة بالنسبة لنا، إلا أن مستقبل تلك التقنية ملئ بالعقبات والتحديات، من ضمن هذه التحديات لوائح وقوانين الدول، فقد بدأت بعض المعايير العالمية للقيادة الذاتية والتي تنص على بعض المتطلبات، ولكن هناك بعض النقاط الغير موضحة والتي تعتبر من أساسيات القيادة الذاتية.
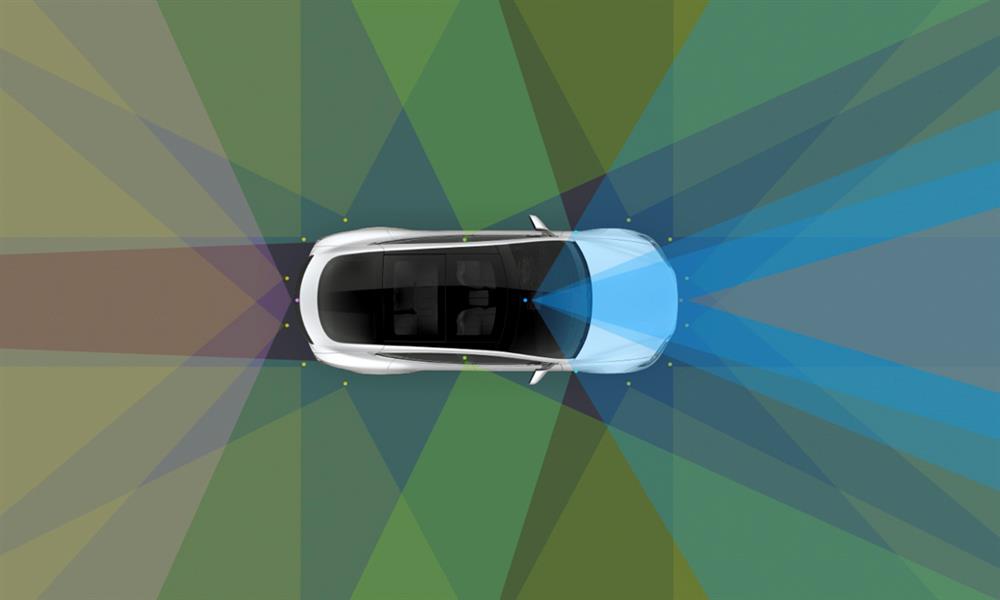
تشمل تلك النقاط نوعية الحساسات المستخدمة للتعرف على الطريق التي قد تؤثر العوامل الجوية أو ازدحام المرور أو عدم وضوح الإشارات المرورية على قراءاتها إذا لم تكن من نوعية مناسبة، بجانب تقنية التعلم الآلي لمعالجة المعلومات المدخلة لأجهزة السيارة و تمييز الأجسام الموجودة أمام السيارة و التي حتى الآن لا توجد لوائح واضحة للتأكد من سلامتها أو كيفية تدريبها و اختبارها و اعتمادها.
يأتي قبول المستهلكين و فهمهم للتقنية بشكل صحيح كعامل مهم أيضا لنجاحها، فعلى سبيل المثال تسلا تطور نظامها الشهير باسم Auto Pilot و الذي ظهر بعده عدة حوادث خطيرة بسبب سوء استخدام بعض السائقين له حيث يتعاملون معه بمفهوم السيارة الذاتية المطلقة التي لا تحتاج إلى تدخل من السائق.
تشدد الشركة على ضرورة انتباه السائق و استعداده للتدخل في أي لحظة عند عجز النظام عن التعامل مع أي موقف مع التأكيد على أنه لم يزل يعتبر ضمن المرحلة الثانية للقيادة الذاتية، بجانب وجود بعض الثغرات التي أقرتها تسلا مثل عدم قدرة النظام على للتعرف على الأجسام الثابتة بسبب تركيزه على السيارات المتحركة حولها.
أطلقت تسلا مؤخرا تحديثا لنظامها للقيادة الذاتية باسم Full Self Driving Beta لعدد محدود من المستخدمين لكن منعت الشركة من استخدام إسم Auto Pilot أو Full Self Driving في ألمانيا عندما رأت المحكمة أنه مضلل للعملاء لأنه لا يزال يحتاج لتدخل من السائق.
اشتملت رؤية إيلون ماسك، الرئيس التنفيذي لتسلا على تقديم المرحلة الخامسة من القيادة الذاتية في أواخر عام ٢٠٢١ ولكن من الواضح أن هذه الرؤية لن تتحقق لأن اختبار التقنيات الجديدة يتطلب متسعا من الوقت مما يعد كتحد أيضا في تطوير أنظمة القيادة الذاتية.
يكمن جزء أخر من المشكلة في التكلفة العالية للإنتاج، فنظام القيادة الذاتية يحتاج لتقنية Lidar المعتمدة على بث أشعة الليزر الضوئية للتعرف الدقيق على الأجسام الموجودة أمام السيارة، مما يزيد من التكلفة كما أنه يعتبر من التقنيات المستحدثة والتي يظل أمامها مشوار كبير من التطوير.
















